The 9th Open Auto Drive Forum (OADF) meeting was hosted by NNG in Budapest, Hungary. After the last meetings in the USA in May and in Japan in November 2017, it was the first meeting in Europe again. As such it focused on the alignment with Standardization activities in Europe.
The speaker of OADF, Dr. Volker Sasse introduced to OADF which is focusing on the use of maps for automated driving. He stated that implementing automated driving will require a fundamental shift of the paradigm of traffic systems from individualism to collectivism. The individual vehicle will become part of the data collecting and sharing crowd. Maps will play an important role as the reference for storing and sharing information. The cooperation in automated driving would save millions of lives.
In its keynote speech, Prof. Zsolt Szalay from the University of Budapest introduced to the research history in autonomous driving projects in Hungary and ‘RECAR’, being a multidisciplinary cooperation for autonomous road vehicles in Hungary. The RECAR program comes with own education and research programs. One focus is testing and validation, ranging from computer simulations up to real traffic system tests on public roads. Hungary is presently constructing a unique proving ground dedicated for testing autonomously driving cars. The RECAR program is embedded in the Smart Mobility Platform in Hungary, targeting also non-technical prerequisites for automated driving such as legislation, standardization and economical aspects.
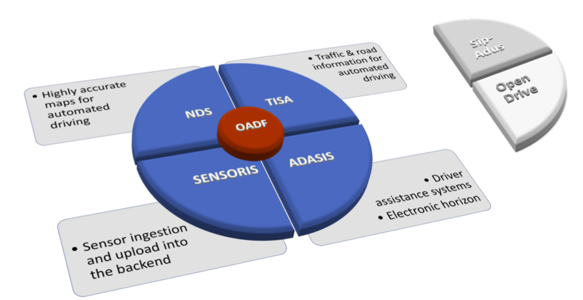
The remainder of the morning sessions was dedicated to introductions and updates from the standardization bodies. Michael Klingsoehr from Bosch SoftTec reported on ADASIS, Dr. Volker Sasse from NavInfo on the Navigation Data Standard (NDS) Association, Prokop Jehlicka from HERE on SENSORIS, Dr. Matthias Unbehaun from TISA on TPEG3, Hiroki Sakai from the Mitsubishi Research Institute on SIP-adus, Stephen T’Siobbel from TomTom on TN-ITS and Michael Scholz from DLR on OpenDRIVE. All organizations were very active in preparing their formats for automated driving and reported on significant progress since the last OADF meetings.
The afternoon session was again dedicated to updates from the cross-organizational working areas in OADF: the evolvement of the OADF Reference Ecosystem, the preparation of highly reliable maps for automated driving as well as the preparation of interfaces between the different standardized formats by implementing a directory of attribute descriptions.
Since its first meeting end of 2015, the OADF meetings attracted a continuously high number of participants. OADF and its three meetings per year across the continents have proven to ensure a continuous information exchange and alignment of all stakeholders dealing with maps in the context of automated driving. Continuing in this spirit, the 10th meeting is scheduled in July 2018 in China. The focus of this second meeting in China is to align again with the rapidly evolving activities in China regarding autonomous driving.
