On July 12, 2018, the Open Auto Drive Forum (OADF) organized its 10th meeting in Wuhan, P.R. China. The meeting was hosted by SAIC Kotei Big Data Cooperation (SAIC KBD), a joint venture between the car manufacturer SAIC Motor Corporation and Kotei Wuhan Informatics.
The meeting was opened by Wang Junde, CEO of Wuhan Kotei Informatics and Director of SAIC KBD. The company was exclusively founded for providing HD maps for automated driving, high precision localization support and big data analysis. In the keynote speech Yudong Li gave interesting insights into the history and development of the joint venture. He presented SAIC KBD’s HAD map ecosystem and their multi-source acquisition process for the maps. By 2019, it is planned to have the complete highway network in China covered plus 33.000km in urban environments.
As many participants were new to the forum, OADF speaker Dr. Matthias Unbehaun gave a short overview of the history, objectives and organizational structure of the forum. OADF aims to be the global platform for sharing knowledge, networking and collaboration between all stakeholders in the automated/autonomous driving realm.
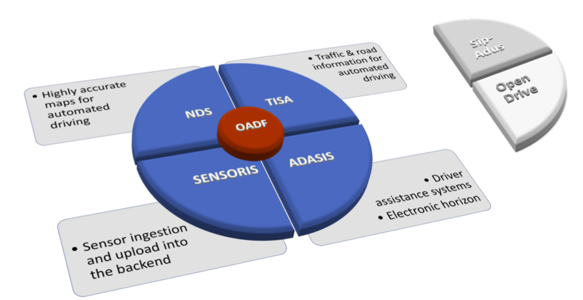
Following the traditional structure of the OADF meetings, the remainder of the morning was used for updates from standardization bodies. Ming Zhang from Bosch reported on ADASIS, Andras Csepinszky from NNG on the Navigation Data Standard (NDS) Association, Prokop Jehlicka from HERE Technologies on SENSORIS, Dr. Matthias Unbehaun from TISA on TPEG3, Hiroki Sakai from the Mitsubishi Research Institute on SIP-adus and Michael Scholz from DLR on OpenDRIVE.
In the afternoon, the meeting participants were updated on the status of the cross-organizational working areas in OADF: the evolvement of the OADF Reference Ecosystem, the preparation of highly reliable maps for automated driving as well as the preparation of interfaces between the different format specifications by implementing a directory of attribute descriptions and mappings.
Within just three years, the Open Auto Drive forum and its three meetings per year across the continents have proven to ensure a continuous information exchange and alignment of all stakeholders dealing with maps in the context of automated driving. Following this spirit, the 11th meeting is planned before the end of the year in the Americas.